
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- モバイルロボット向けVisual AI/Visual SLAM 自律走行ソリューション
- VI-SLAM 3Dポジショニングシステム評価キット Alphasense Position
VI-SLAM 3Dポジショニングシステム評価キット
シリーズ名
AlphasensePosition
シリーズ名
AlphasensePosition
産業グレードのVisual-SLAM 高精度3Dポジショニングシステム





- マップのどこからでも開始できる高精度3Dポジショニング
- センチメートルレベルの正確度を実現
- 平均誤差最大4mmの高い再現性で自己位置を出力
- プラグ&プレイのキャリブレーション済み評価キット
- 屋内外、床面の状況や傾斜など環境問わず使用可能
- 動的に変化する環境でも継続的にマップを更新
- シンプルなUIで専門的なノウハウなしで使用可能
- OTA(Over-the-air)アップデートに対応
- 設置場所に応じた水平・垂直の2モデルを用意
- NEWマップ拡張機能追加
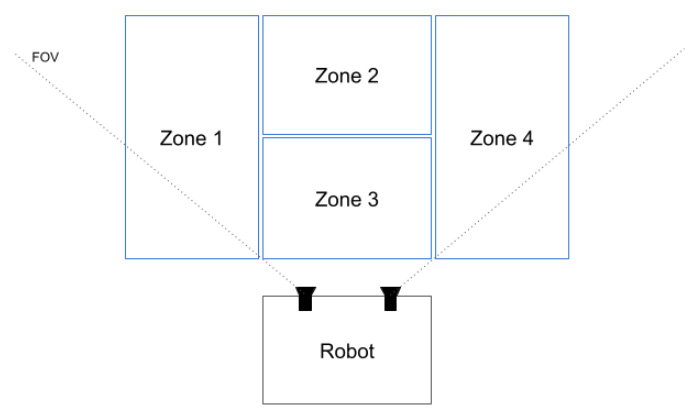
- 衝突回避を支援するゾーン占有レポーター機能(開発中オプション)
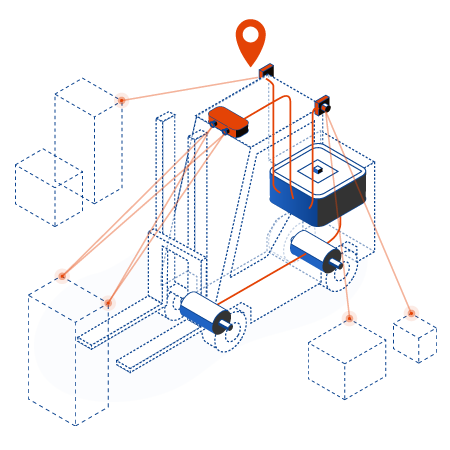
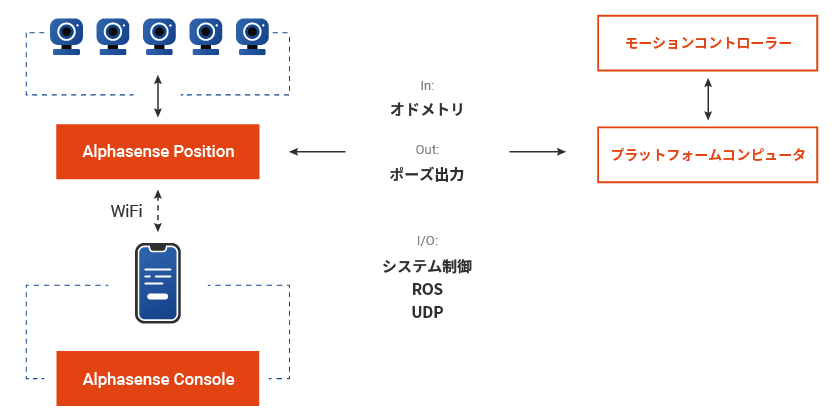
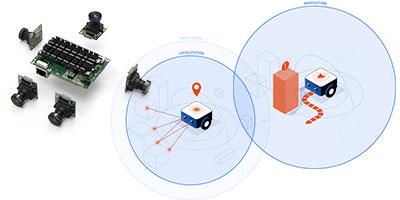
Sevensense RoboticsのAlphasense Positionは、複数カメラのVisual-SLAM(マッピング&ローカライゼーション)技術を搭載した高精度3Dポジショニングシステムです。センサーには、5つの高感度カメラと高精度6軸IMUを採用しています。センサーはキャリブレーション済みで、プラグ&プレイでご利用いただけます。UIもシンプルで、専門的なノウハウは必要ありません。搭載対象のプラットフォームは、自動走行ロボット、AGV(無人搬送機)、AMR(自律走行搬送ロボット)、自律走行フォークリフトなどで採用されている産業用グレードのシステムです。
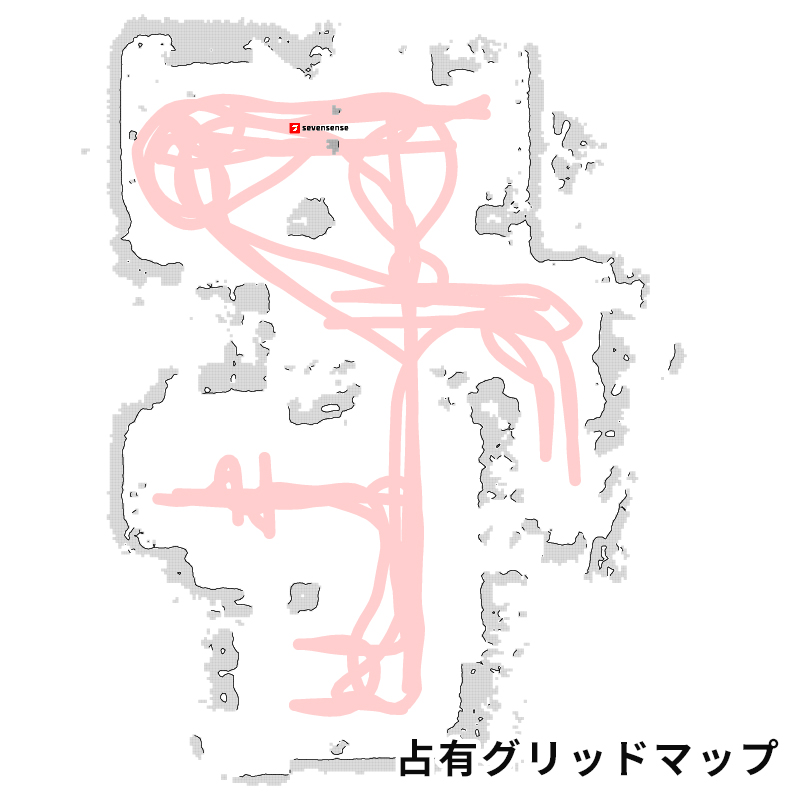
屋内、屋外、凹凸や傾斜のある場所など環境問わず使用でき、動的に変化する環境でも継続的にマップを更新し、常に最新のマップを提供可能です。取得したマップはAlphasensePosition間で共有することができ、複数台でのフリート制御にも活用いただけます。ArUcoマーカーの位置情報取得や占有グリッドマップの出力に対応しており、グローバル座標系との連携が行えます。出力される自己位置は平均誤差最大4mmで、非常に高い再現性を有しています。
システムはUDPでデータ通信を行っており、UDP-ROSブリッジを利用することでROSでの制御にも対応しています。OTA(Over-the-air)アップデートに対応しており、ネットワークに接続することで最新のファームウェアにアップデート可能です。SevensenseのSLAM技術を製品に組込む場合は、ハウジングなしやカメラを増やすこともできますのでご相談ください。
- 屋内や屋外、または両方の環境
- 凹凸があったり、人のいる動的エリア
- 開けた広いスペースや自己相似環境
- ボタン1つで動作し、ロボットの専門知識が不要
- マーカーやビーコン、費用の掛かるツール、設置のための中断も不要
- 簡単な評価とインテグレーションで素早くマーケットへ
- フリート内でそれぞれのロボットからのデータを共有
- 標識検出など人間判断をAIで代替
- 検査報告に役立つ画像データの取得
| Alphasense Position | 2D LiDAR 特徴点検出 | 2D LiDAR マーカー検出 | |
|---|---|---|---|
| 工事なしでの利用 |  |
|
- |
| 動的に変化する環境 | |
 |
- |
| 公共の混雑した場所 | |
- | |
| 傾斜路 | |
- | - |
| 広いホール | |
|
|
| 長い廊下 | |
- | |
| 屋外/屋内 | |
- | - |
| 開始時の自己位置検出 | |
|
|
| シリーズ名 | AlphasensePosition |
|---|---|
| マッピング& ポジショニング |
出力:6DoFポーズ(自己位置+マップ内での姿勢)、占有グリッドマップ、システム情報 ポーズ精度:繰り返し精度 平均誤差4mm(typ.)、正確度自由走行時 <3.5cm(typ.) ポーズ出力周期:オドメトリの入力周期に等しい 最大移動速度:5m/s オドメトリ(wheel odometry)信号の入力必須:20-50Hzの周期で、Sevensense UDPメッセージまたはROSメッセージにて線速度・角速度を入力 |
| カメラ | キャリブレーション済みカメラ5個、グローバルシャッター、ハイダイナミックレンジ、高感度、モノクロ 720×540(約40万画素) 画像取得は行えません。ご希望の場合はお問い合せください。 |
| IMU | 6DoF(6自由度):加速度計・ジャイロスコープ データレート:200Hz |
| データ同期 | カメラ画像とIMUを100μs以下の精度で同期し共通クロックでタイムスタンプを付与 |
| インターフェース | データ入出力プロトコル:ROS(イーサネット接続/Wi-Fi)、イーサネットUDP UDP-ROS bridge(Ubuntu 20.04 + ROS noetic amd64/arm64、Ubuntu 18.04 + ROS melodic amd64/arm64に対応) 制御プロトコル:WEBインターフェース、REST API プラットフォームコンピュータとのNTP時刻同期:プラットフォームコンピューター上で動作するNTPサーバーが必要です |
| 通信 | 有線:ギガビットイーサネット 無線:WiFi 802.11ac(その他オプション:4G/LTE/UMTS) アンテナポート:WWAN+AUX SMAコネクタ; WiFi(WLAN) RP-SMAコネクタ |
| 電源 | 動作電圧:9-32V 消費電力:18W(typ.)、最大30W Molex Mini-Fit 2x2ピン |
| 動作温度/湿度 | -20℃~40℃ / 最大95% rh |
| 最低照明レベル | 15LUX |
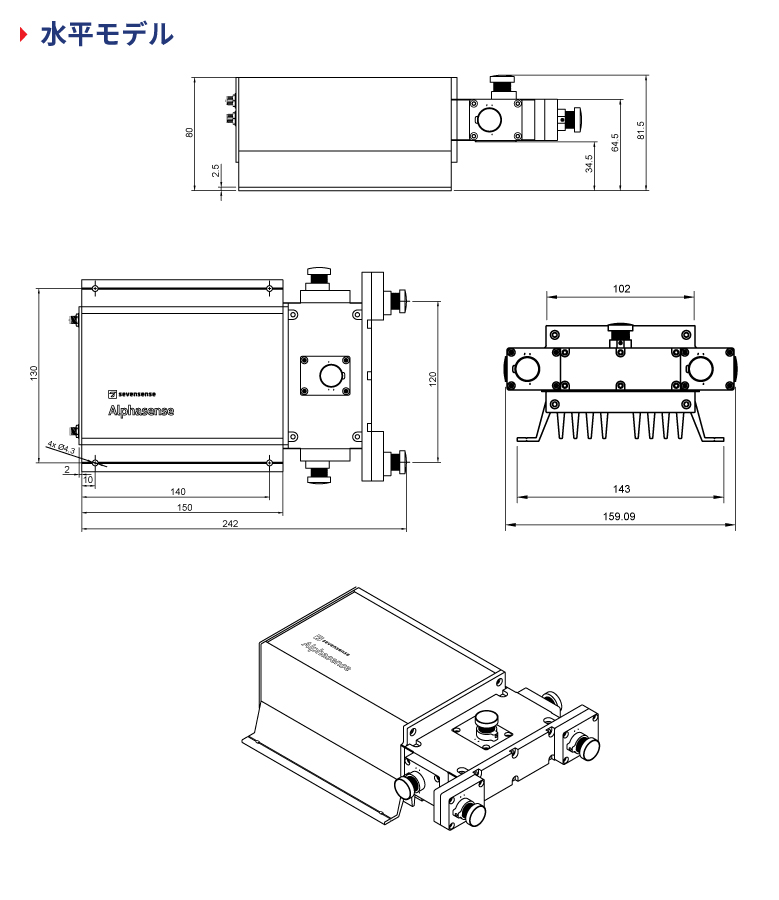
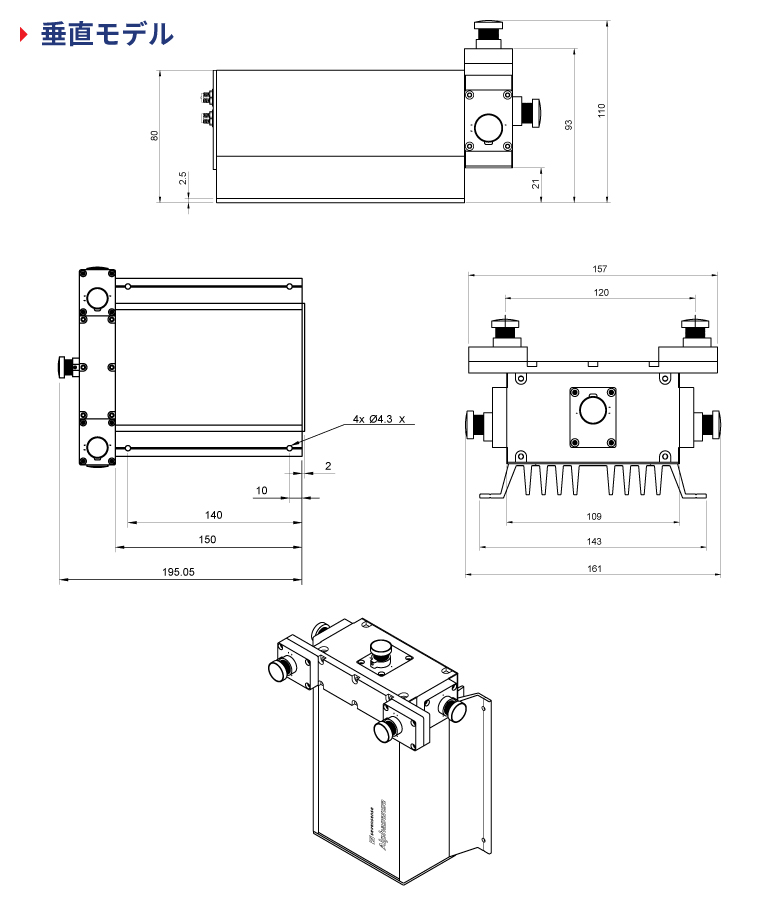
| サイズ | 水平モデル:幅約159.1mm × 奥行約241.1mm × 高さ約80mm 垂直モデル:幅約159.1mm × 奥行約109.2mm × 高さ約195.1mm |
| 重量 | 約1528g |
寸法図 ※クリックすると拡大表示されます
Alphasense Console(コンソール) ※画像をクリックすると拡大表示されます
ダッシュボード
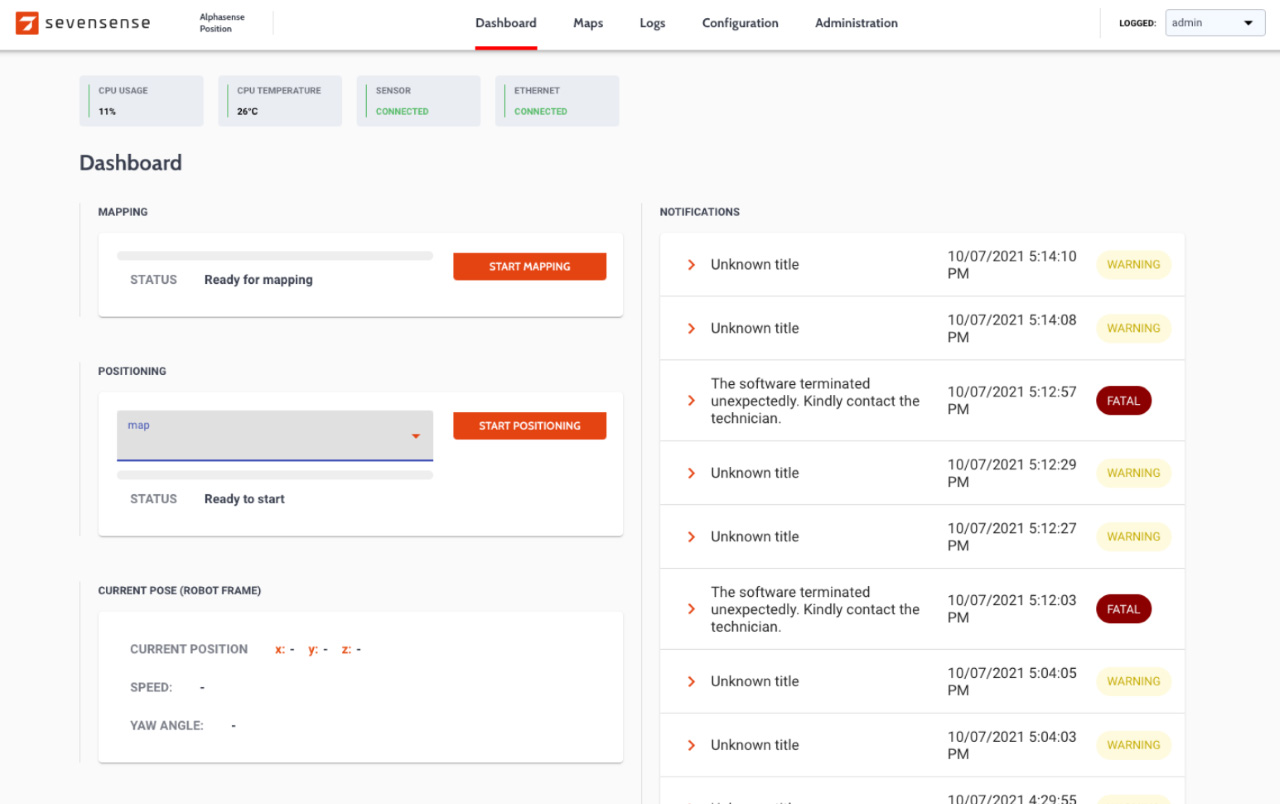
・マッピング処理とポジショニング処理の開始と終了
・システムの状態を確認(CPU消費量(%)、CPUの温度(℃)、センサー出力状態、イーサネット接続状態)
・システムからの通知
・リアルタイムのポーズ(自己位置・姿勢)出力
・NEWマップ拡張機能(以下動画参照)
マップページ
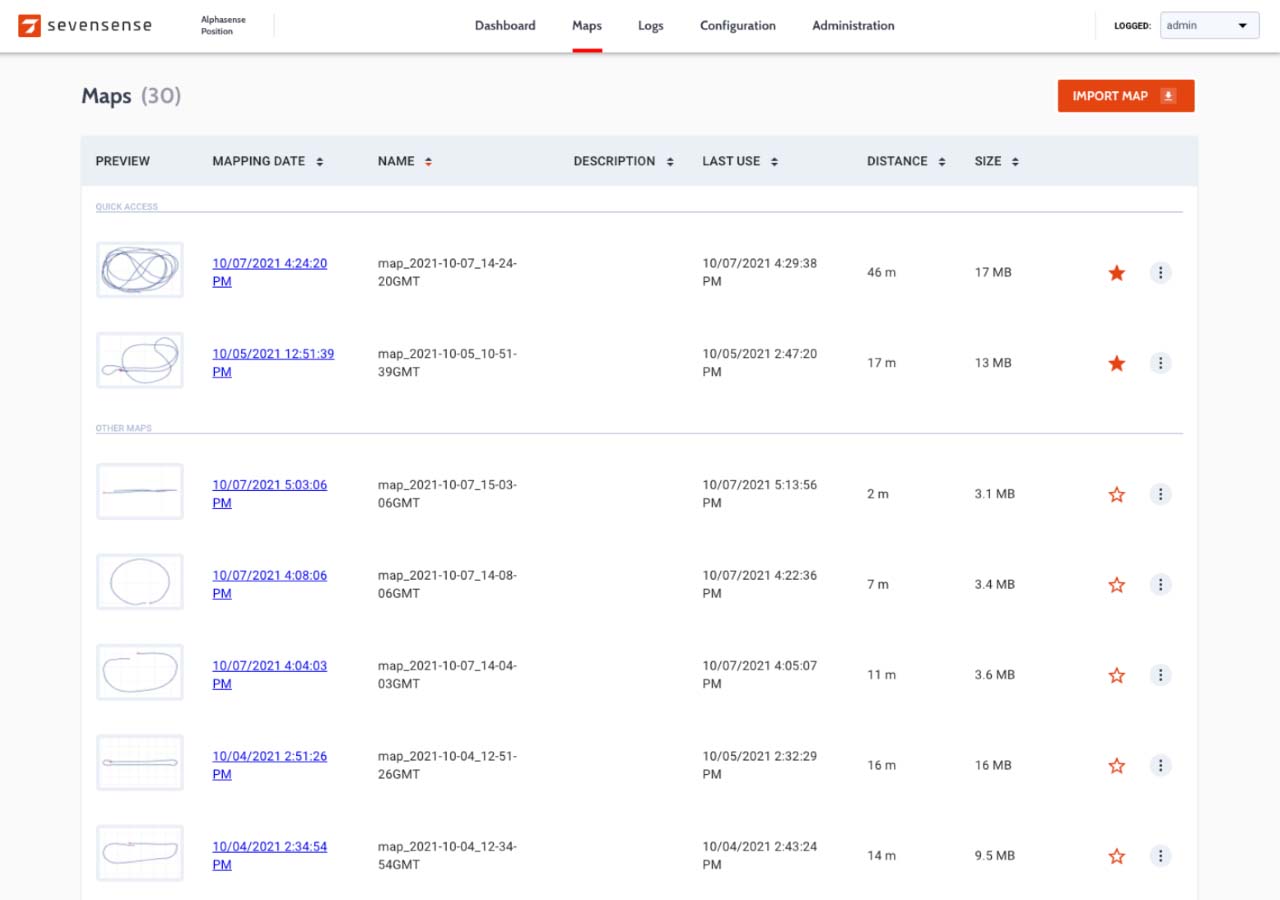
システムに保存されている全ての利用可能なマップが表示され、情報修正(名称変更、説明追記、お気に入り登録)、インポート/エクスポートや削除などマップの管理が行えます。
設定ページ
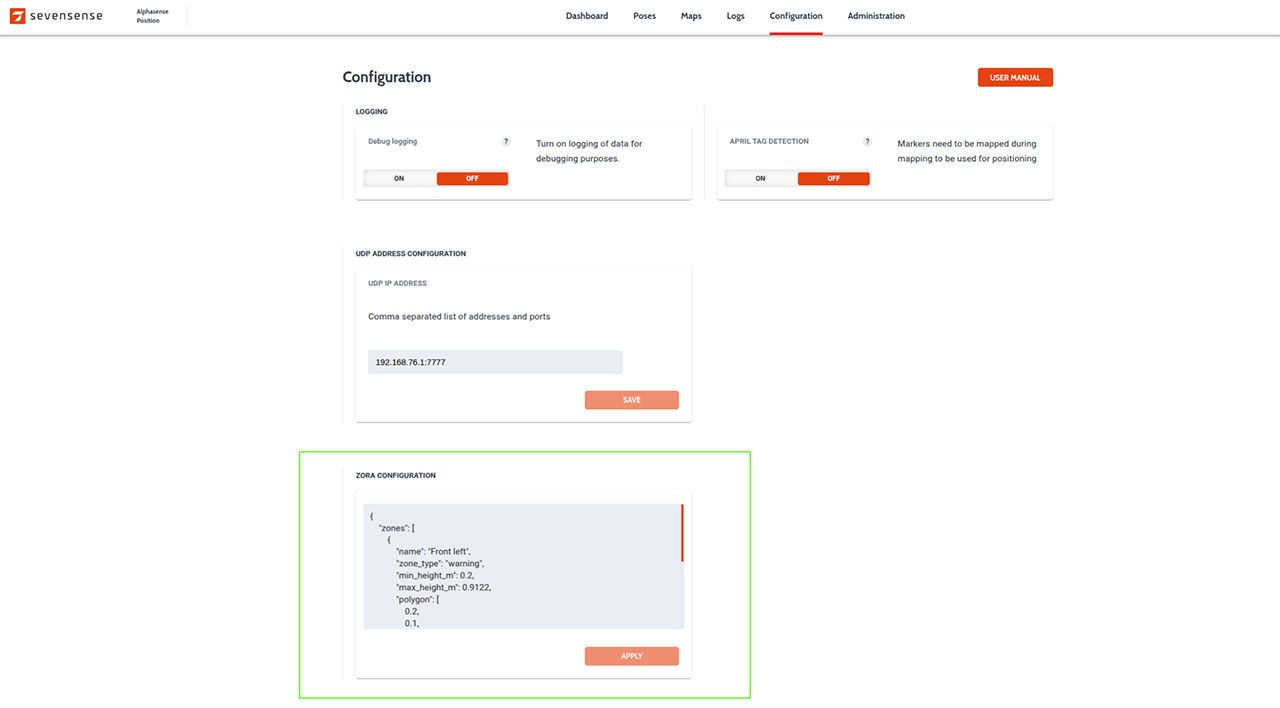
・ロギング:デバッグ用画像情報取得の有効/無効
・Arucoマーカー検出:環境のArucoタグをマップに埋込み自己位置推定を堅牢化
・UDPアドレス設定:出力データ送信先のIPアドレスとポートの設定
・キャリブレーション:Alphasense Positionと車両のオドメトリ基準座標のキャリブレーション
・時間オフセットキャリブレーション:Alphasense Positionとオドメトリ信号間での時間オフセット
・ZORA設定(開発中オプション):ステレオビジョン視野内に定義したゾーンの占有情報を出力。
障害物検知の補完や衝突回避性能強化、ナビゲーションシステムへの追加支援に利用可能。(以下画像:設定イメージ)
管理ページ
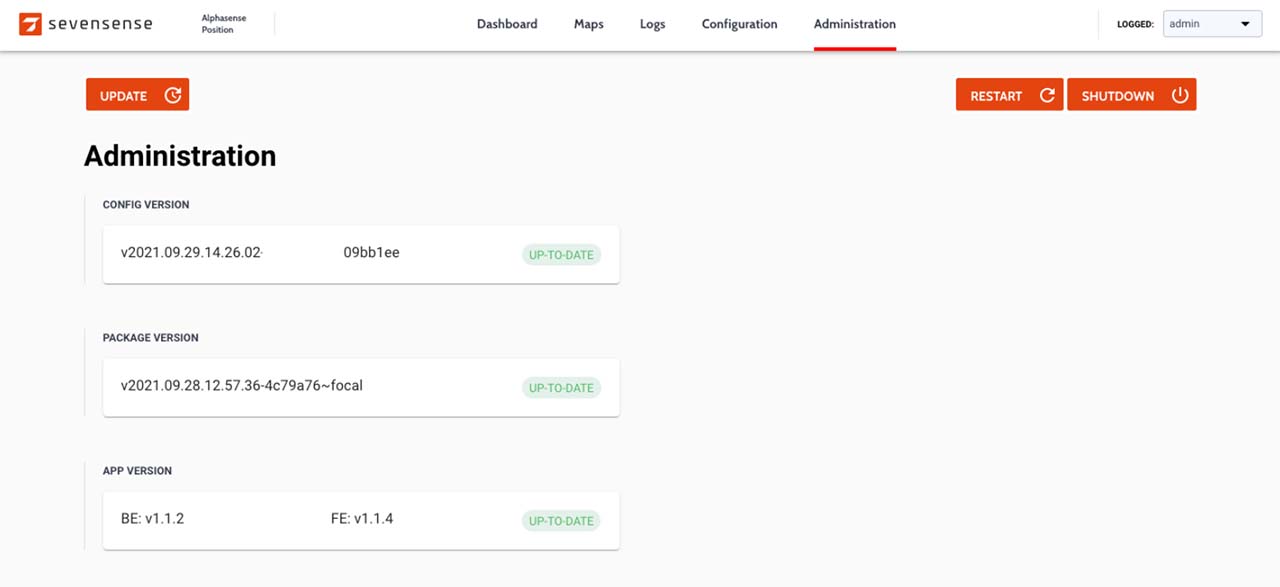
・ソフトウェアバージョン
・構成バージョン
・Alphasenseコンソール フロントエンド/バックエンドのバージョン
・ソフトウェアアップデートの実施
・システムの再起動
・システムのシャットダウン

クリーニングロボット


デリバリーロボット

自動走行フォークリフト


物流ラストワンマイル配送ロボット
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- モバイルロボット向けVisual AI/Visual SLAM 自律走行ソリューション
- VI-SLAM 3Dポジショニングシステム評価キット Alphasense Position
