
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- モバイルロボット向けVisual AI/Visual SLAM 自律走行ソリューション
- Visual-AIナビゲーションソリューション Alphasense Autonomy
Visual-AIナビゲーションソリューション
シリーズ名
AlphasenseAutonomy
シリーズ名
AlphasenseAutonomy
モバイルロボット向けカメラベースのナビゲーションシステム





- 3DビジュアルSLAMナビゲーションシステム
- 屋内外、床面の状況や傾斜など環境問わず使用可能
- 動的に変化する混雑した環境でも利用可能
- マップを継続的に自動更新
- 2D LiDARを使用した障害物回避機能
- シンプルなWEB GUIで専門的な知識なしで操作可能
- AGV・AMRなどの統合操作のためのVDA5050標準に準拠
- 設置場所に応じた水平(横)・垂直(縦)の2モデルを用意
- メーカーインテグレーション必須
- ROS対応
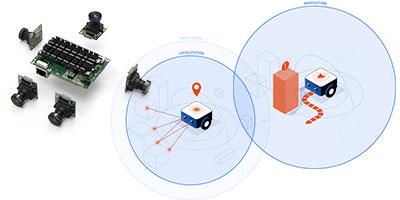
Sevensense Roboticsは、複数カメラを用いた業界最高クラスのビジュアルSLAM (マッピング&ローカライゼーション)処理技術を有しています。Alphasense Autonomyは、そのSLAMアルゴリズムによる高精度3Dポジショニングと高度なAIパーセプション、ナビゲーション技術を組み合わせたロボット向け自律制御システムです。信頼性の高い安全動作と高度な動作制御、動的な障害物回避機能を備え、あらゆる移動ロボットに搭載可能です。
センサは5つの高感度カメラ画像と高精度6軸IMUデータを搭載しています。このセンサからの出力データと車輪からのオドメトリ情報を使用して処理を行います。シンプルで使いやすいWEB GUI(Alphasense Console)を備えており、専門的な知識がなくてもご利用いただけます。
屋内や屋外、傾斜のある場所、多階層など環境問わず使用でき、動的に変化する環境でも継続的にマップを更新し、常に最新のマップを提供可能です。取得したマップはAlphasenseシステム間で共有することができ、複数台でのフリート制御にも活用できます。プラットフォームは、自動走行ロボット、AGV(無人搬送機)、AMR(自律走行搬送ロボット)、自律走行フォークリフトなどでご利用いただけます。車両へのインテグレーションはメーカーの作業が必要となります。
システムはUDPでデータ通信を行っており、UDP-ROSブリッジを利用することでROSでの制御も可能です。SevensenseのSLAM技術を製品に組込む場合は、より自由度の高い設計が可能ですので、詳細はお問合せください。
- 3D Visual SLAMをベースとしたナビゲーション
- 障害物の検知・回避によって搬送の効率化を実現
- 屋内、屋外、傾斜、多階層など幅広い環境に対応
- 自動キャリブレーションによって現場での時間を節約
- 外部設備や高精度マップなどが不要
- 専門知識なしで簡単に素早く使用開始できる
- 高い繰返し精度で正確なドッキング
- マップをリアルタイムに更新しフリート全体で共有
- 人と車両が共存するスペースでも安全に走行可能
| シリーズ名 | AlphasenseAutonomy |
|---|---|
| システム構成品 | 5つのカメラを搭載したAlphasense Autonomyユニット WEBユーザーインターフェースのAlphasense Console |
| 付属アクセサリ | - キャリブレーションターゲット - 電源供給用のMolex Mini-Fit ピグテール - 4Gアンテナ - Wi-Fiアンテナ |
| ポジショニング | 精度:走行時±20mm、±2° 、停止位置±5mm、±1° |
| ナビゲーション | マニュアル操作でループクローズしたバーチャルパスを教示し追従 進行方向:前進のみ 精度:走行時±50mm、±4° 、停止位置±30mm、±2° 障害物対応モード:停止(デフォルト)、回避 |
| 最大移動速度 | 1.0m/s |
| 入力信号 | - 障害物検知のための距離測定(2D LiDAR) - 車両の線速度と角速度を表すホイールオドメトリ ※詳細は システム構成 を参照 |
| 出力信号 | - 速度コマンド:線速度(m/s)、角速度(rad/s) - 6DoFポーズ(マップ内での自己位置と姿勢) - ローカライゼーション品質基準:0(最低)から5(最高)まで |
| 通信 | バイナリUDP:基本的な入出力データストリーム ROS:UDP-ROSブリッジを使用してバイナリUDPメッセージをROSメッセージに変換 TCP:2D LiDARメーカー指定のプロトコルで出力されるレーザースキャナーによる測距データをAlphasense Autonomyが直接読取り REST API:以下のシステム制御 - ステートマシン制御(スタート/ストップ操作) - ミッションの選択 - ミッションのインポートとエクスポート - 設定とソフトウェアアップデート - 通知/警告/エラーログへのアクセス - システムのシャットダウン |
| ユーザーインターフェース | Alphasense Console: - モバイル端末やデスクトップPCから接続するシステム管理のためのWEB GUI - Alphasense AutonomyからのWi-Fiホットスポットまたは有線接続で接続 - 設定やキャリブレーションなど車両への統合プロセスのサポートを提供 - ミッションの作成と実行など車両の操作に使用 |
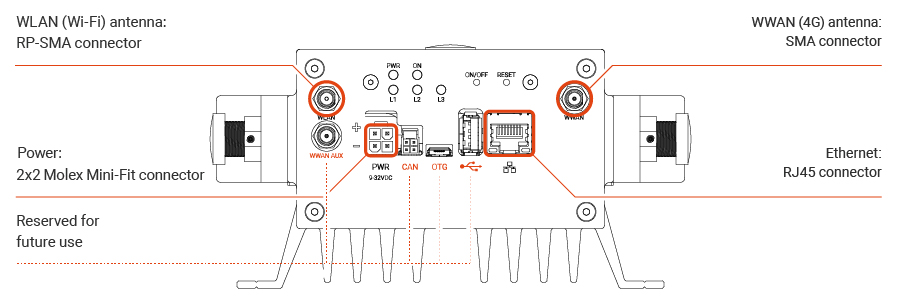
| ネットワーク接続 | 有線:ギガビットイーサネット 無線:WiFi 802.11ac、4G/LTE(EU, JP, US地域対応) アンテナポート:WWAN+AUX SMAコネクタ; WiFi(WLAN) RP-SMAコネクタ |
| 電源 | 動作電圧:9-32V 消費電力:18W(typ.)、最大30W |
| 最低照明レベル | 15LUX |
| 動作温度/湿度 | -20℃~40℃ / 最大95% rh |
| 防塵防水規格 | IP40 |
| 耐衝撃 | 30g(6ms)繰返し 50g(6ms)繰返しなし DIN EN 60068-2-27に基づく試験 |
| 耐振動 | 3 g RMS(10 ... 500 Hz) DIN EN 60068-2-64に基づく試験 |
| コンプライアンス | RoHS、REACH |
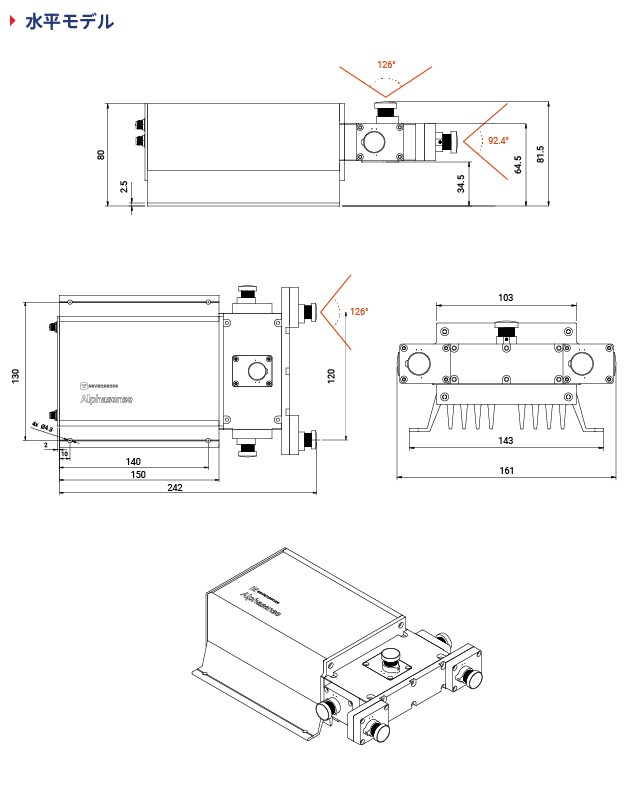
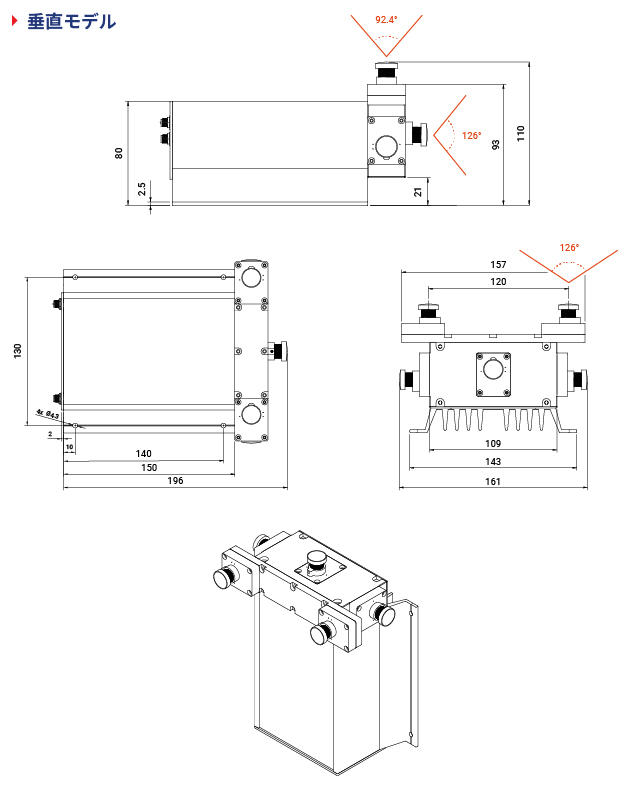
| サイズ | 水平モデル:幅約159.1mm × 奥行約241.1mm × 高さ約80mm 垂直モデル:幅約159.1mm × 奥行約109.2mm × 高さ約195.1mm |
| 重量 | 約1528g |
インターフェース
寸法図 ※クリックすると拡大表示されます
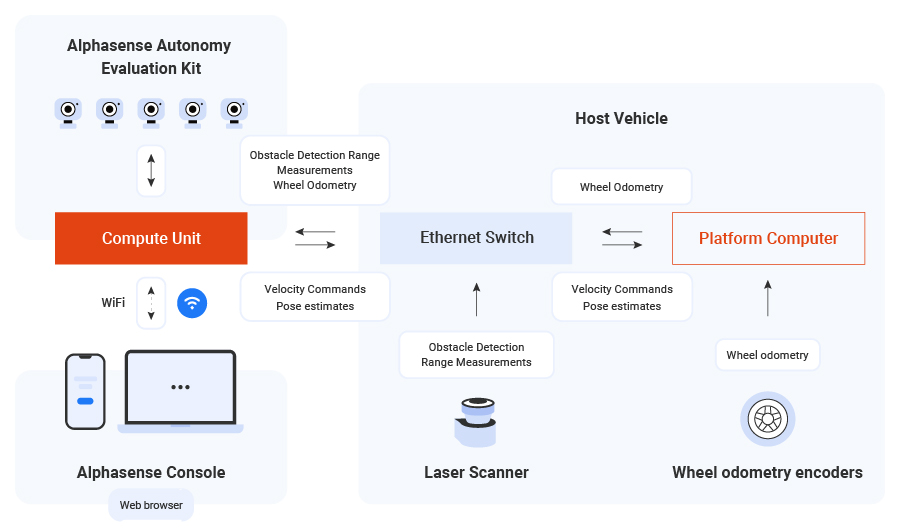
Alphasense Autonomyは、車両制御を行うために、イーサネットネットワーク、プラットフォームコンピュータ、センサ類(レーザースキャナー、ホイールオドメトリ)などの車載モジュールと通信する必要があります。Alphasense Consoleは、システム操作を行うためのWEBユーザーインターフェースです。Wi-Fiホットスポットや有線イーサネットからアクセスできます。
車両要件 ※評価キットには含まれません
| プラットフォーム コンピュータ | 以下に対応したPCまたはPLC -ギガビットイーサネットアダプタを搭載 -バイナリUDPおよびTCPプロトコルでの通信 -REST APIリクエストの送受信(Alphasense Consoleを使用しない場合) -ROSを使用する場合(UDP-ROSブリッジ経由)Intel x86またはARMベースのPC、Ubuntu 20.04、ROS Noetic |
|---|---|
| サポート駆動型 | 差動駆動 |
| オドメトリセンサ | ホイールエンコーダからの信号を用いてロボットの相対運動を測定するモーションセンサ -世界座標系に対するロボット座標系の線速度と角速度を出力 -メッセージの遅延が50ms以下で最小であること -タイムスタンプが付与されている -メッセージは20-50Hzの周期で配信される |
| レーザースキャナ | 障害物の検出・回避に、距離測定を行うレーザースキャナーを使用します。 推奨モデル:SICK nanoScan3、SICK microScan3、SICK outdoorScan3 |
注意事項
Alphasenseシステムは安全機能を有しておらず、各種安全規制には準拠しておりません。お客様の責任において、用途に応じて必要な安全度水準を満たした安全装置を、Alphasense Autonomy評価キットより優先して動作するように車両への実装をお願いします。通常、そのような安全装置は、車両のPLCやモーションコントローラに直接接続されます。

クリーニングロボット


デリバリーロボット

自動走行フォークリフト


物流ラストワンマイル配送ロボット
| 商品コード(型番) | 構成/内容 | 価格 |
|---|---|---|
| 評価キット ※Alphasense Autonomyとインテグレーションサポートパッケージはセットでの購入が必要です |
||
| AlphasenseAutonomy_EK_H | Alphasense Autonomy VI-SLAM ナビゲーションシステム評価キット 水平モデル | お問い合わせ |
| AlphasenseAutonomy_EK_V | Alphasense Autonomy VI-SLAM ナビゲーションシステム評価キット 垂直モデル | お問い合わせ |
| Alphasense_int_onsite | インテグレーションサポートパッケージ、国内オンサイト | お問い合わせ |
| Alphasense_int | インテグレーションサポートパッケージ、スイス・メーカー対応、車両運送別 | お問い合わせ |
| 量産プロジェクト | ||
| AlphasenseAutonomy_SP_PROJECT | Alphasense Autonomy 量産プロジェクト | お問い合わせ |
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- モバイルロボット向けVisual AI/Visual SLAM 自律走行ソリューション
- Visual-AIナビゲーションソリューション Alphasense Autonomy
