
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- リアルタイム高精度測位センサ Vision RTK2/Vision RTK2 Plus
IMU性能を向上させたVision RTK2 Plusをリリース開始!
リアルタイム高精度測位センサ
製品名
Vision RTK2 / Vision RTK2 Plus
製品名
Vision RTK2 / Vision RTK2 Plus
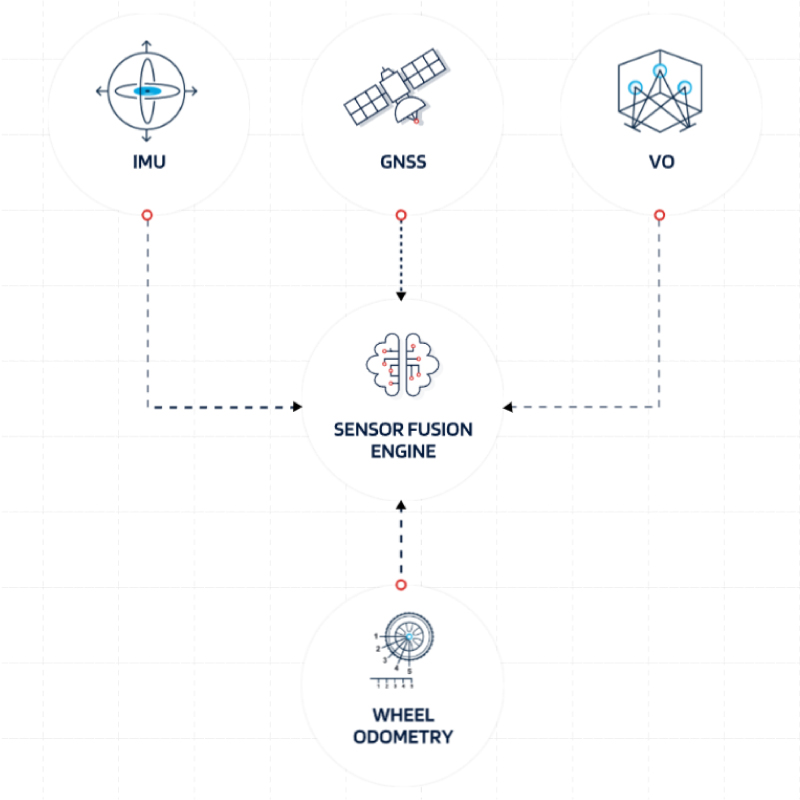
ディープセンサフュージョンシステム



【動画更新!】実機デモ映像公開中↓

- 独自のセンサフュージョンで高精度なリアルタイム姿勢・位置推定
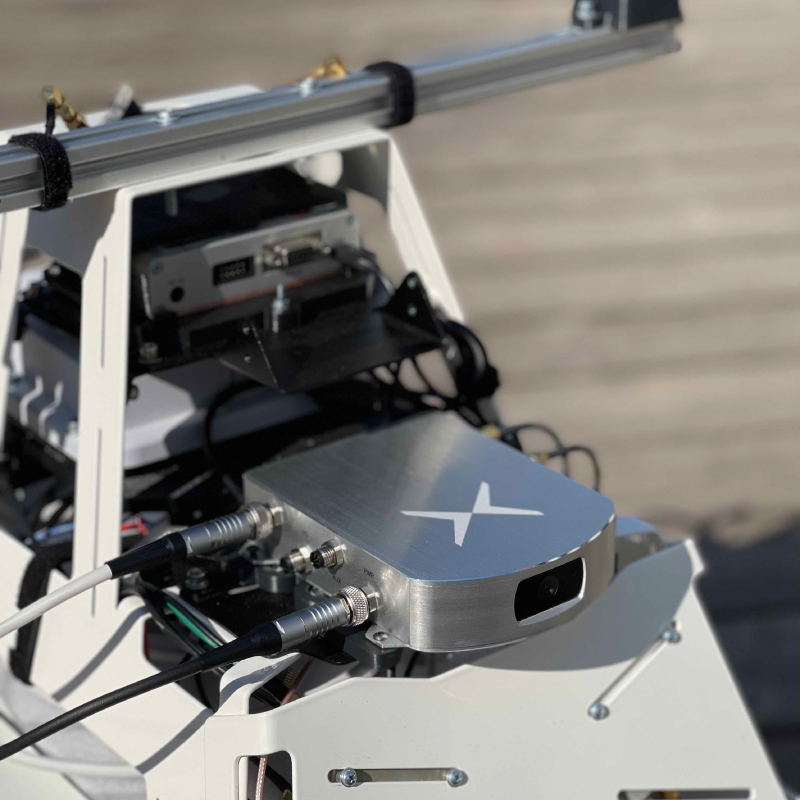
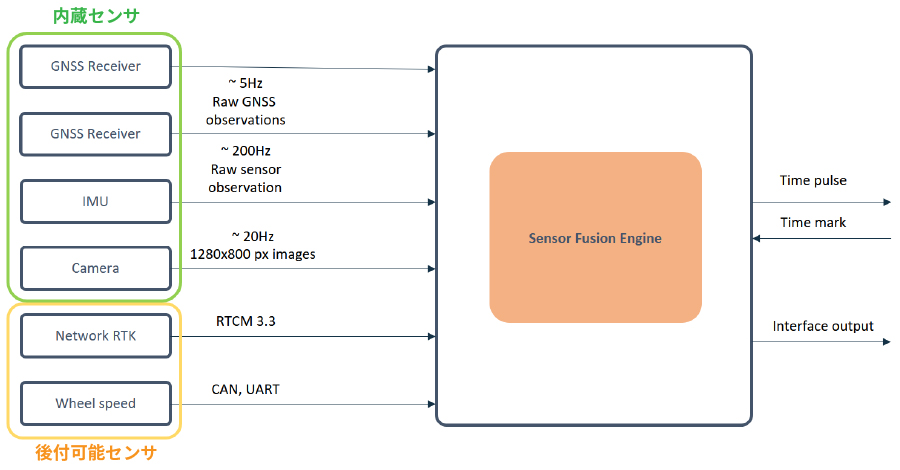
- オンボードセンサ群(Dual-RTK-GNSS、camera、IMU)
- Webインタフェースで簡単設定、モニタリング
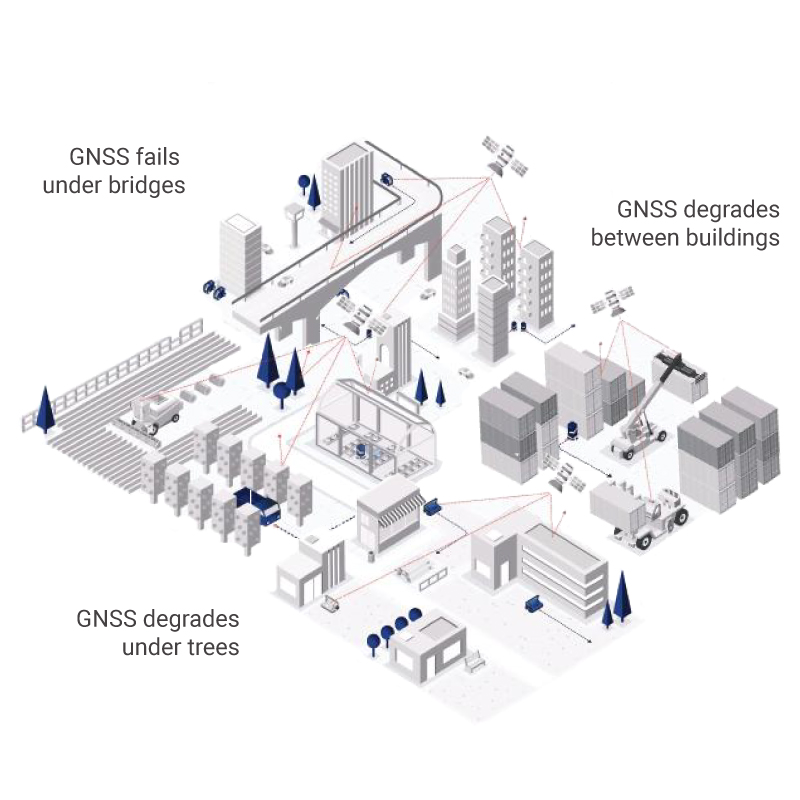
Fixposition社の Vision RTK2 / Vision RTK2 Plus は、GNSSの受信環境が悪い高架下や高い建物の影などあらゆるシナリオで、高精度に位置・姿勢情報をリアルタイムに提供するハイエンドのセンサフュージョンソリューションです。
このシステムには、方位を計算できる2つの多周波数のリアルタイム・キネマティクス(RTK)GNSS受信機、組み込みカメラ(Visual-Odometry)、IMUが含まれており、短期間のGNSS停止環境でも高精度な測位を継続的に提供します。
また、必要に応じて補助センサを追加し、性能を向上させることも可能です。

| 製品名 | Vision RTK2 | Vision RTK2 Plus | ||
|---|---|---|---|---|
| 出力レート | 200Hz | |||
| 水平・垂直精度(RTK受信時) | 1.0cm + 1ppm | |||
| ヨー角度精度 | 0.4° | |||
| 速度精度 | 0.05m/s | |||
| 最大速度 | 22m/s(GNSSのみの場合500m/s) | |||
| 移動距離のエラーパーセンテージ | 0.75% ※wheel odometry入力時 | |||
| Acquisition時間 | 25s(Coldスタート時) | |||
| データフォーマット | NMEA、ROS | |||
| RTK入力データ形式 | RTCM3.3 over UART or NTRIP | |||
| Wheel Odometry入力データ形式 | CAN、UART | |||
| デュアルRTKレシーバー | GPS/QZSS(L1C/A, L2C) Galileo(E1B/C, E5b) Beidou(B1I, B2I) GLONASS(L1OF, L2OF) |
|||
| カメラ | CMOS(グローバルシャッター)、120°DFOV | |||
| IMU | Gyro Range | ±2000 °/s | ±300 °/s | |
| Gyro Bias Instability | 5 °/h | 0.5 °/h | ||
| Gyro Angle Random Walk(ARW) | 0.168 °/√h | 0.015 °/√h | ||
| Accelerometer Range |
main | ±16g | ±8g | |
| high-dynamic | N/A | ±26 g | ||
| Accelerometer Bias Instability | 0.05mg | 0.15mg | ||
| Accelerometer Velocity Random Walk(VRW) | 0.0382m/s/√h | 0.03m/s/√h | ||
| 内部ストレージ容量 | 16GBフラッシュメモリー | |||
| 有線コネクタ | UART×2、CAN、イーサネット、USB-C | |||
| ワイヤレス通信 | Wi-Fi 802.11 ac/a/b/g/n | |||
| GNSSアンテナコネクタ | SMA×2 | |||
| カメラ入力 | MIPI CSI-2×2 | |||
| 動作電源 | DC 5~36V | |||
| 消費電力(Typical) | 7.5W | |||
| 寸法/重量 | 113×130×30mm/420g | |||
| 動作・保管温度 | -40~85℃ | |||
| 耐環境性能 | IP6K6 | |||
▲タブのトップへ戻る
▲タブのトップへ戻る

- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- リアルタイム高精度測位センサ Vision RTK2/Vision RTK2 Plus
