
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- ハイエンド自己位置推定システム PBx-A1
ハイエンド自己位置推定システム
製品名
PBx-A1
製品名
PBx-A1
ハイグレードRTK GNSS・IMU・マルチカメラを使用




- ハイグレードRTK GNSS・IMU・2台のマルチカメラと小型PCを一体化
- GNSSの衛星信号の受信環境が低下する場所でも
ドリフトを極力抑えた自己位置情報を提供
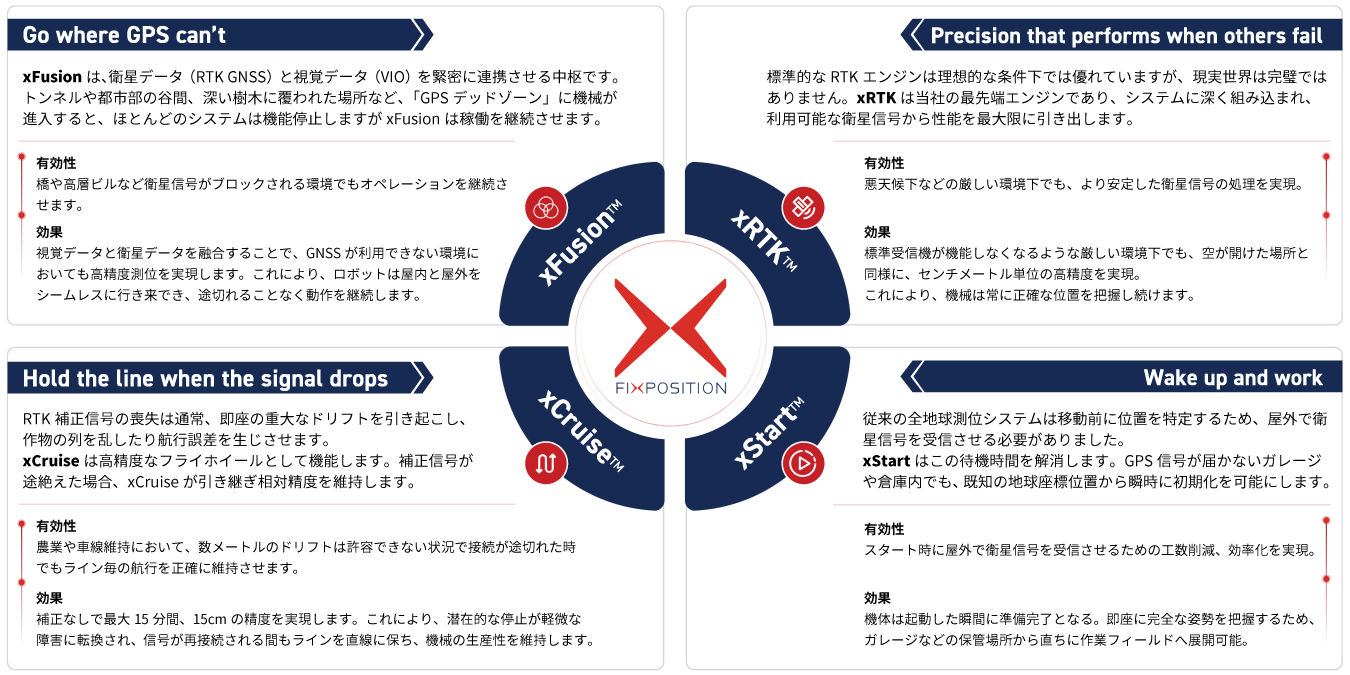
Fixposition社のPBx-A1は、ハイグレードのRTK GNSS・IMU・2台のマルチカメラと小型PCを一体化した自己位置推定システムです。
同社が開発したAIシステム「xFusion」「xRTK」「xCruise」「xStart」を用い、GNSSの衛星信号の受信環境が低下する高層ビル周辺や高架下や高い木々周辺、一時的なトンネル侵入時などの場所でもドリフトを極力抑えた自己位置情報を提供します。


| 製品名 | PBx-A1 | ||
|---|---|---|---|
| 水平・垂直精度(RTK受信時) | 0.6cm + 1ppm | ||
| ヨー角度精度 | 0.05°@4m baseline , 0.15°@1m baseline | ||
| 速度精度 | 0.03m/s | ||
| 移動距離のエラーパーセンテージ | 0.75%以下(UDR)、0.4%以下(ADR) | ||
| データフォーマット | NMEA、ROS(Noetic)、ROS2(Humble/Jazzy) | ||
| RTK入力データ形式 | RTCM3.x over UART or NTRIP | ||
| デュアル RTKレシーバー |
GPS/QZSS | L1 C/A , L2C , L5 | |
| BDS | B1I , B1C , B2a , B3l | ||
| Galileo | E1 B/C , E5a , E6 | ||
| GLONASS | L1 , L2 | ||
| カメラ | 3MP Global Shutter RGB Cameras ×2 | ||
| IMU | Gyro Range | ±300°/s | |
| Gyro Bias Instability | 0.5°/h | ||
| Gyro Angle Random Walk(ARW) | 0.015°/√h | ||
| Accelerometer Range |
main | ±8g | |
| high-dynamic | ±26g | ||
| Accelerometer Bias Instability | 0.15mg | ||
| Accelerometer Velocity Random Walk(VRW) | 0.03m/s/√h | ||
| 有線コネクタ | GbE×1,COM (RS232/485/UART/CAN)×2 , GPIO ×8 | ||
| 動作電源 | 9-36V DC | ||
| 寸法/重量 | 16 × 11 × 6cm / 600g(本体のみ) | ||
| 使用温度 | -40℃ ~ +85℃ | ||
| 保管温度 | -40℃ ~ +90℃ | ||
| 耐振動 | Random12 MIL-STD-810G (CH1) Method | ||
| 防塵・防水性能 | IP66 | ||
▲タブのトップへ戻る
| 商品コード(型番) | 構成/内容 | 価格 |
|---|---|---|
| PBx-A1 | ハイエンド自己位置推定システム | お問い合わせ |
▲タブのトップへ戻る

- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- ハイエンド自己位置推定システム PBx-A1
