
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 3D-LiDARセンサ Hesai Technology
- 長距離・高解像度 Pandarシリーズ
長距離・高解像度 3D-LiDARセンサ
製品名
Pandar40P / Pandar128E3
製品名
Pandar40P / Pandar128E3
独自開発のLiDARチップにより高性能なLiDARイメージングを実現



- 次世代の全方位・高解像三次元LiDARセンサ
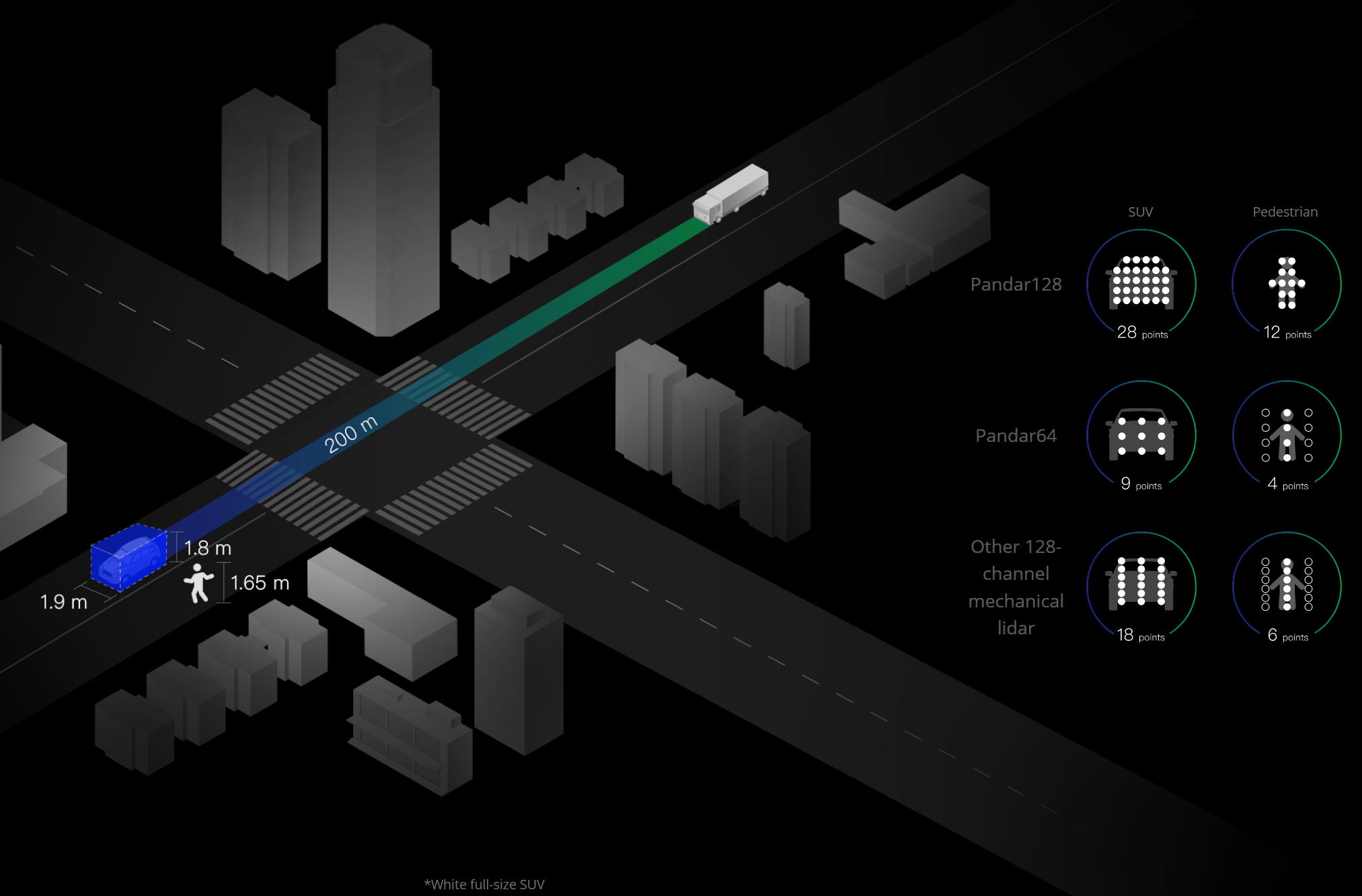
- 水平360°と垂直40°の視野で200mまでの距離レンジ
- チャンネル数128ラインで0.1°の分解能
- 測定スピードは10 or 20Hz、マルチエコー対応
- 回転型とは思えない静動設計の機構
- PTP対応、コンパクト設計、高い環境性能
Hesai Technology社のPandar40P / Pandar128E3は、独自のLiDAR-ASICと次世代プラットフォームを搭載し、水平360°・垂直40°で200mまでの長距離レンジに対応した高解像度3D-LiDARセンサです。
128ラインの高解像度チャンネルを有し、自律走行トラック・シャトル、ロボットタクシー等に画像レベルの高密度点群を提供します。
国際OEM規格に基づくDVテスト・信頼性テストを実施しているASIL-B対応の車載グレードのLiDARセンサです。
| 商品コード(型番) |  AR-Pandar-40P ※2025年末 生産・サポート終了予定 |
 AR-Pandar-128E3 |
|
|---|---|---|---|
| チャンネル数 | 40 | 128 | |
| FOV 水平 | 360° | ||
| FOV 垂直 | 40°(-25° ~ +15°) | ||
| 測定距離 | 0.3 ~ 200m(10% ref) | ||
| 測定スピード | 10 or 20Hz | ||
| マルチエコー | Single(Last or Strongest), Dual | ||
| 測定ポイント数 | Single | 720,000点/秒 | 3,456,000点/秒 |
| Dual | 1,440,000点/秒 | 6,912,000点/秒 | |
| 分解能 水平 | 0.2°(10Hz) 0.4°(20Hz) |
0.1°/0.2°(10Hz) 0.2°/0.4°(20Hz) |
|
| 分解能 垂直 | 0.33° ~ 6°(non-linear) | 0.125° ~ 1°(non-linear) | |
| 精度 | ±5cm(0.3 ~ 1m) ±2cm (1 ~ 200m) |
±8cm(0.3 ~ 0.5m) ±5cm(0.5 ~ 1m) ±2cm (1 ~ 200m) |
|
| 干渉ノイズ除去機能 | あり | ||
| レーザークラス・波長 | 905nm , Class1 Eye Safe | ||
| 耐環境性能 | IP6K7 | IP6K7 & IP6K9K | |
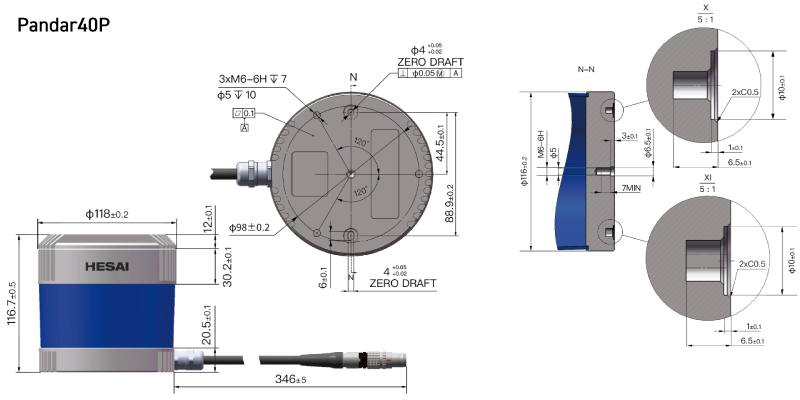
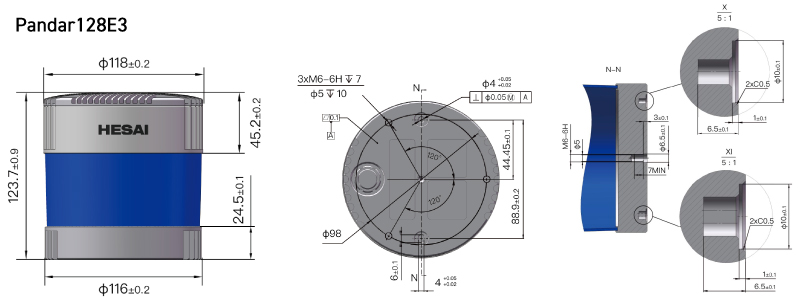
| サイズ・重量 | Φ116.7 × 118.0mm 1.52kg | Φ118.0 × 123.7mm 1.63kg | |
| 電源 | DC 9 ~ 48V | ||
| 消費電力 | 18W(typical) | 27W(typical) | |
| 動作温度 | -20 ~ 65℃ | -20 ~ 85℃ | |
| インタフェース | 1000Base-TX、UDP | 1000Base-TX or 1000Base-T1、UDP | |
| 出力データ | 距離、回転角度、輝度 | ||
| データレート | Single | 18.78Mbps | 134.7Mbps |
| Dual | 37.56Mbps | 269.3Mbps | |
| 時刻同期 | GPS/PTP , gPTP | ||
| センサ設定 | WEB GUI , HTTP API | ||
| ソフトウェア | SDK、ROSドライバ(ROS1 ROS2)、 ビューワーソフトウェア付属(Windows 10 64bit , Ubuntu 16.04/18.04/20.04) |
||
寸法図
▲タブのトップへ戻る
長距離レンジ
![]() 100kluxの環境光下において、反射率10%のターゲットを200mまで、 1E-5以下のノイズ率で検出することができます。
100kluxの環境光下において、反射率10%のターゲットを200mまで、 1E-5以下のノイズ率で検出することができます。
高い正確度と精度
![]() 精度は、0.3~1mでは±5cm、1~200mでは最大±2cmで、二乗平均平方根誤差(RMSE)は2cm以下です。
精度は、0.3~1mでは±5cm、1~200mでは最大±2cmで、二乗平均平方根誤差(RMSE)は2cm以下です。
高解像度
![]() 10Hzハイパフォーマンスモードで、最大水平0.1°×垂直0.125°の解像度で取得できます。
10Hzハイパフォーマンスモードで、最大水平0.1°×垂直0.125°の解像度で取得できます。
干渉ノイズの除去
![]() すべてのパルスに個別のコードを与えることで干渉ノイズを除去します。
すべてのパルスに個別のコードを与えることで干渉ノイズを除去します。
高い保護性能
![]() IP6K9KとIP6K7に準拠しています。
IP6K9KとIP6K7に準拠しています。
データ通信
![]() 車載イーサネットと通常のイーサネットの両方に対応しています。
車載イーサネットと通常のイーサネットの両方に対応しています。
gPTP時刻同期プロトコルに対応
![]() マイクロ秒レベルの高精度な時刻同期に対応しています。
マイクロ秒レベルの高精度な時刻同期に対応しています。
▲タブのトップへ戻る
▲タブのトップへ戻る
| 商品コード(型番) | 構成内容 | 価格 | |
|---|---|---|---|
| AR-Pandar-40P | 長距離・高解像度 3D-LiDARセンサ Pandar40P | お問い合わせ | |
| AR-Pandar-128E3-TX | 長距離・高解像度 3D-LiDARセンサ Pandar128E3 インタフェースTX | お問い合わせ | |
| AR-Pandar-128E3-T1 | 長距離・高解像度 3D-LiDARセンサ Pandar128E3 インタフェースT1 | お問い合わせ | |
| オプション | AR-Pandar40P/64-Cable5 | Pandar40P/64用延長ケーブル5m | お問い合わせ |
| AR-Pandar40P/64-Cable8 | Pandar40P/64用延長ケーブル8m | お問い合わせ | |
| AR-Pandar128E3-Cable5 | Pandar128E3用延長ケーブル5m | お問い合わせ | |
| AR-Pandar128E3-Cable8 | Pandar128E3用延長ケーブル8m | お問い合わせ | |
▲タブのトップへ戻る
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 3D-LiDARセンサ Hesai Technology
- 長距離・高解像度 Pandarシリーズ
