構成品目
- 3Dスキャナー本体
- PoEインジェクター
(入力:90 ~ 264 VAC, 出力:33.6 W, 56 V PoE, IEEE802.3at) - 電源ケーブル+国別電源プラグ(JP/US/EU/UK)
- M12X-RJ45イーサネットケーブル(5m)
- 計測評価ソフトウェア&SDK(ダウンロード)

製品名
MotionCam-3D-M
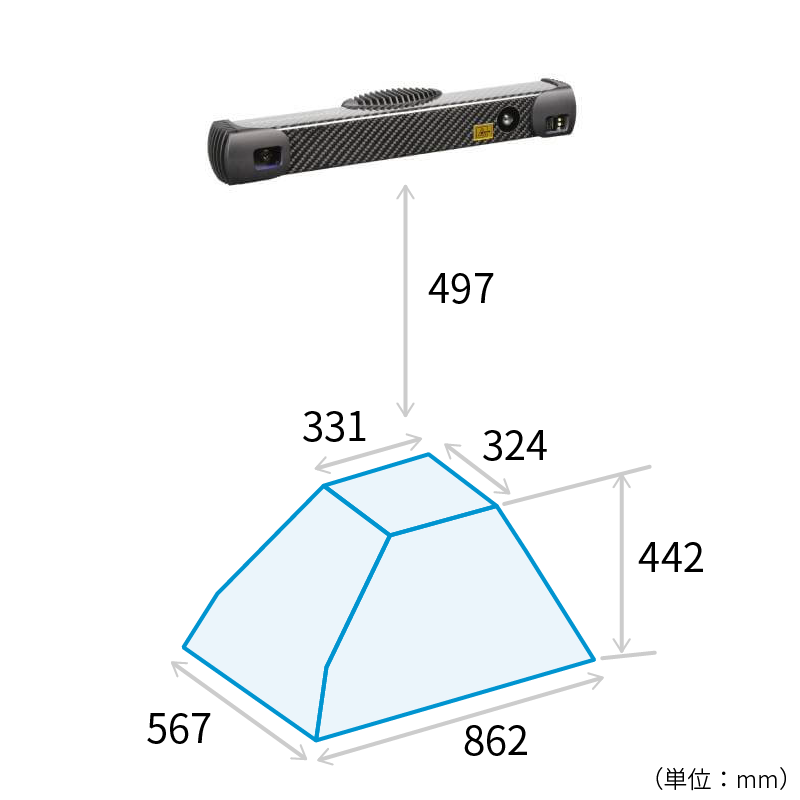

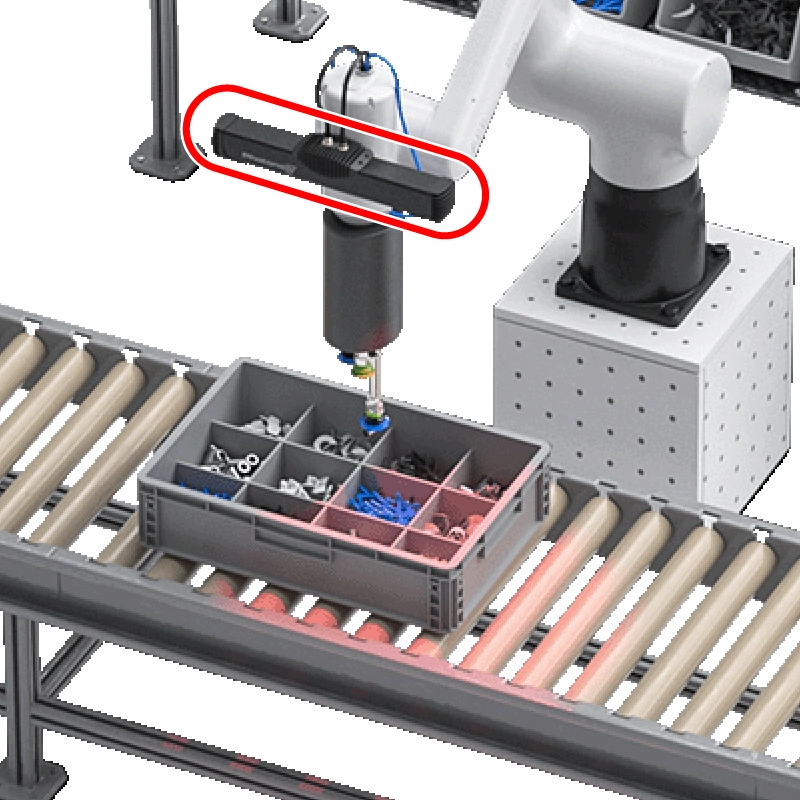
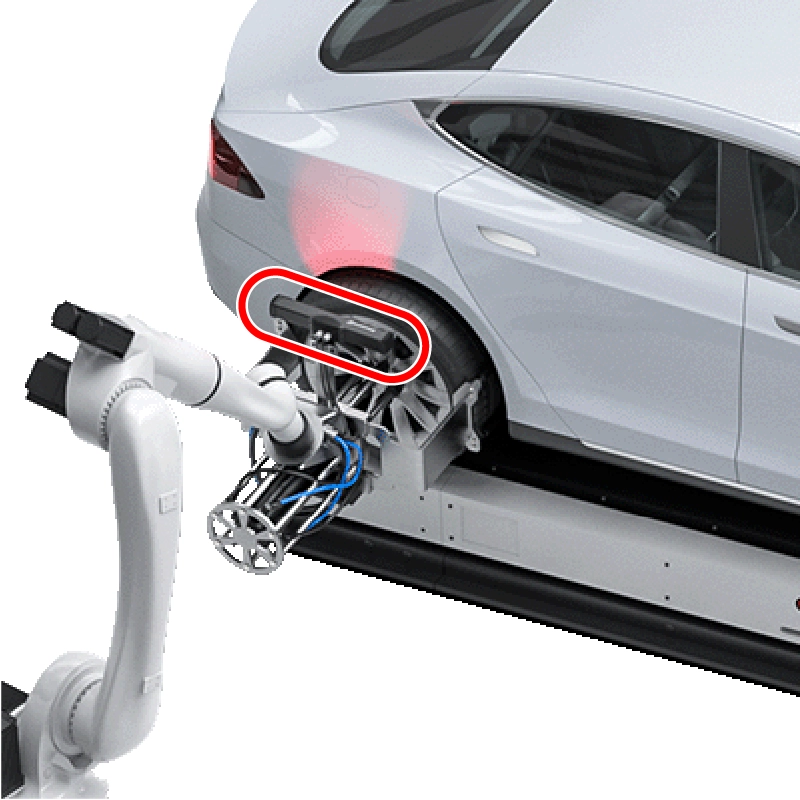


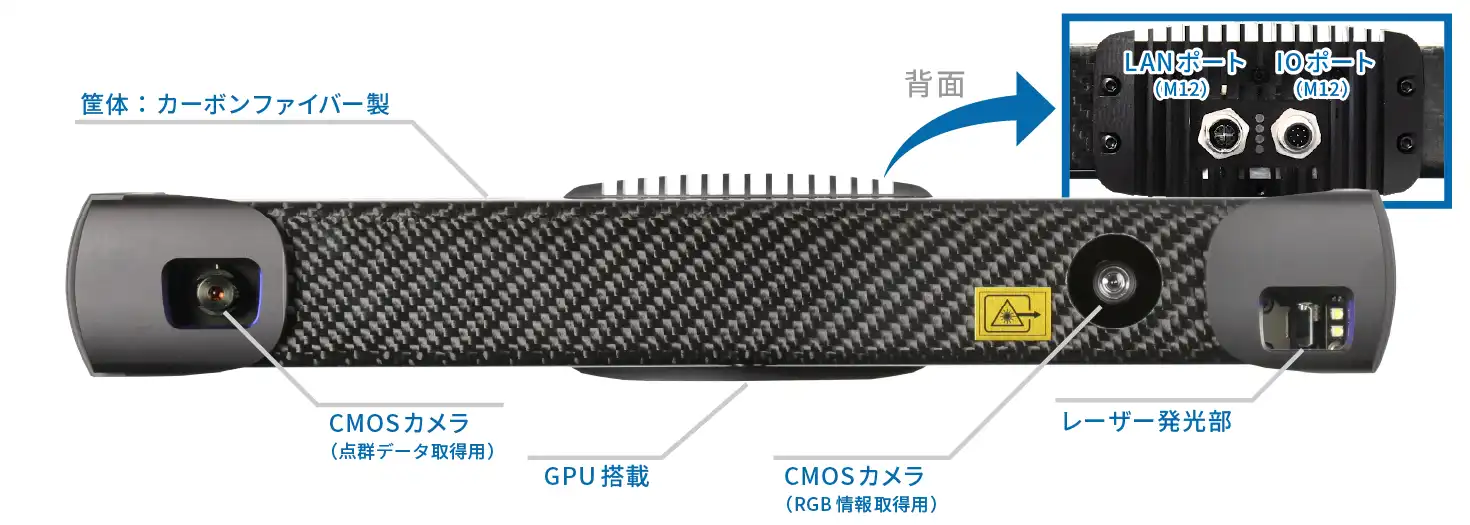
Zebra Technologies社のPhotoneo事業GのMotionCam-3D-M 高速・広範囲3Dリアルタイムスキャナーは、独自開発のパラレル・ストラクチャー投影技術(特許)とGPUを搭載し、測定エリア862×567×442mmの範囲で動いている物体をリアルタイムで三次元情報を測定することができます。
200万画素のダイナミックなカラー点群(3D、モノクロ&カラーデータを取得可能)で、光沢物や黒色など高反射率・低反射率ワーク、又は透過物でもセンシングが行えます。エッジがぼやけず歪がない3Dデータを提供し、外乱光に影響されず、低ノイズで高精度測定をカラーで実現しました。
| スキャン範囲 |
|
||||||||
|---|---|---|---|---|---|---|---|---|---|
| 3Dスキャン方式 | パラレル・ストラクチャー投影技術(特許) | ||||||||
| 解像度(3Dポイントクラウド) | 最大200万画素(1680×1200) | ||||||||
| カラー画像解像度 (3Dマッピングデータ) |
200万画素(2Dデータは最大800万画素) | ||||||||
| ポイントサイズ | 0.55mm @ 90万画素、0.37mm @ 200万画素 | ||||||||
| 校正精度(1σ) | < 0.5mm | ||||||||
| T/N(テンポラルノイズ1σ) | < 0.1mm | ||||||||
| デプスマップ解像度 | 1680×1200 | ||||||||
| フレームレート | 20fps(最速) | ||||||||
| データ取り込み時間 | 10ミリ秒 | ||||||||
| 最大オブジェクト/カメラ速度 | 40m/秒 | ||||||||
| データ出力 |
カラー3D点群(X/Y/Z) モノクロ3D点群(X/Y/Z) Normals(X/Y/Z) デプスマップ(Z) テクスチャー(輝度・グレースケール) Confidence(推定誤差) |
||||||||
| 3D点群データ出力形式 | PLY、PTX、TIF、RAW | ||||||||
| 熱設計(本体&環境) | サーマルスタビライゼーション機能 | ||||||||
| 3D点群処理能力 | 1500万ポイント/秒 | ||||||||
| レーザークラス | Blue(Class2)/ Blue(Class3R)/ Red(Class3R) | ||||||||
| 内蔵GPU | NVIDIA PascalTMアーキテクチャ GPU with 256 CUDA コア | ||||||||
| 撮影モード | フリーランモード or トリガーモード(ソフト/ハード) | ||||||||
| キャリブレーション | スキャナー本体で可能 | ||||||||
| インタフェース | GigE(1000BASE-T) | ||||||||
| 電源 | PoE or 24VDC | ||||||||
| ベースライン | 350mm | ||||||||
| 防水防塵 | IP65 | ||||||||
| 使用環境温度 | 0 ~ 40℃ | ||||||||
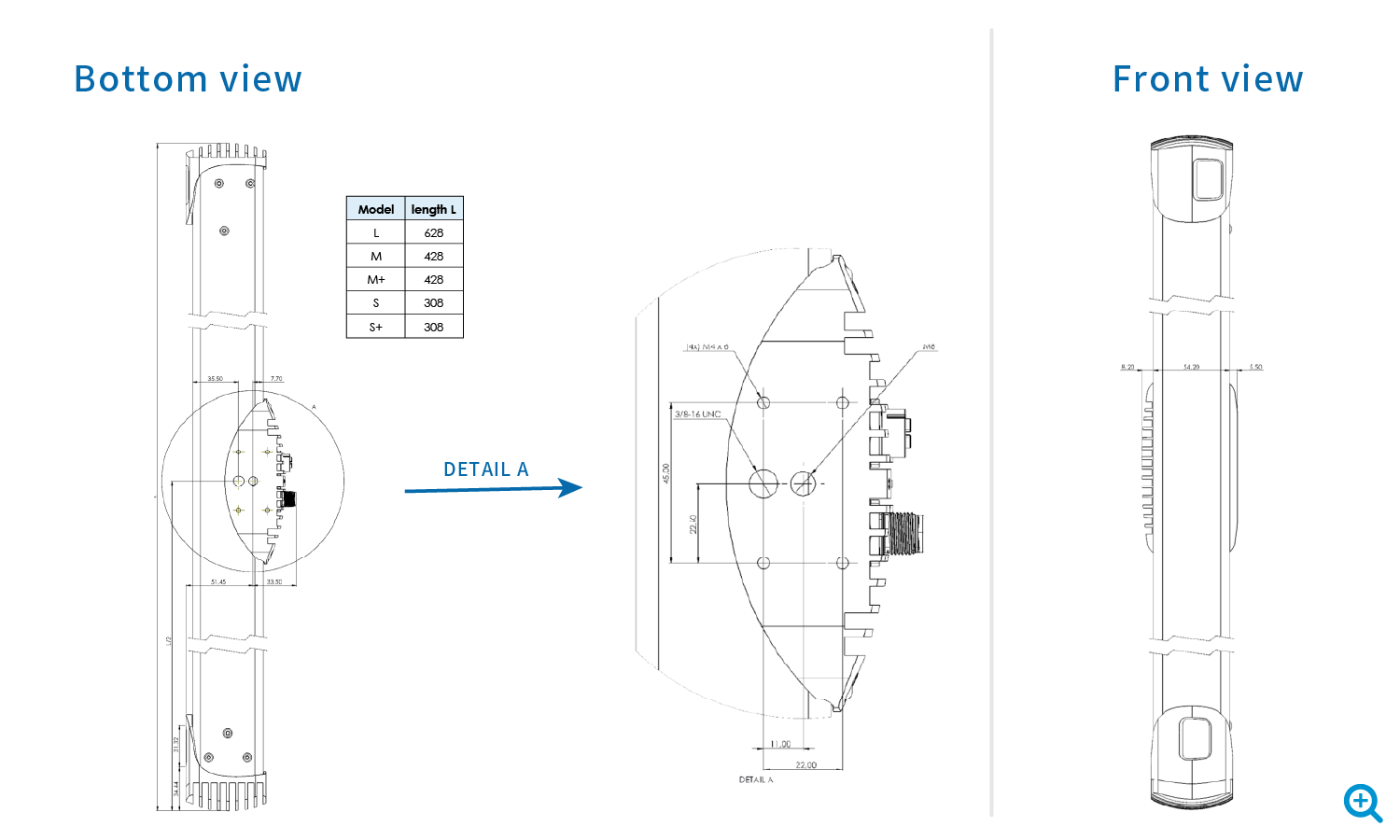
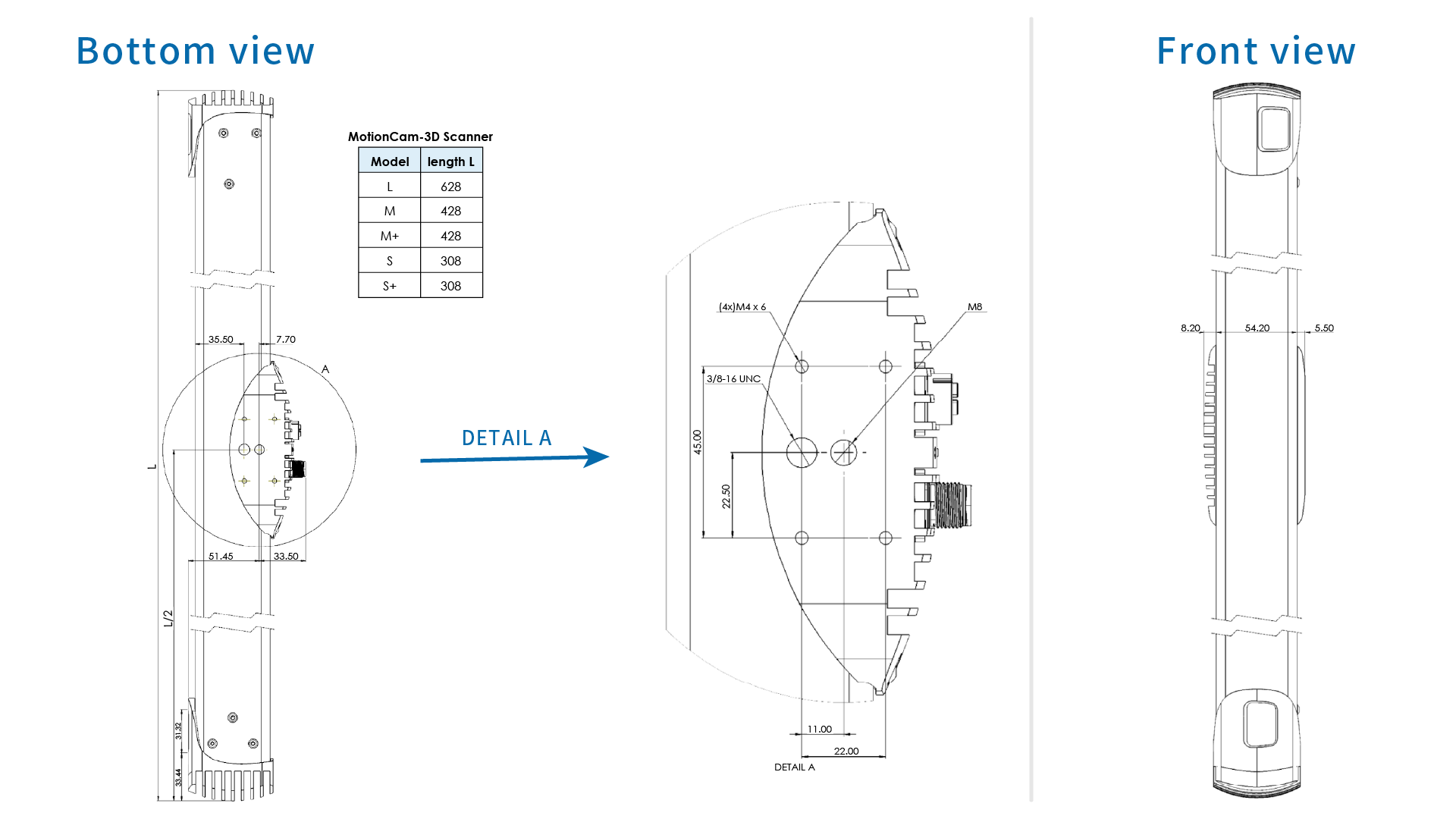
| 寸法 | 428mm×68mm×85mm | ||||||||
| 重量 | 1050g | ||||||||
| 対応OS | Windows10/11、Linux(Ubuntu18/20/22) | ||||||||
| ソフトウェア | 計測評価ソフトウェア付属 | ||||||||
| SDK | C++ / C# 付属 | ||||||||
| API | ZEBRA、ROS、OpenCV、Halcon、Point Cloud Library(PCL)対応 |
| 商品コード(型番) | 構成/内容 | 価格 | |
|---|---|---|---|
| スキャナー | MotionCam-3D-M-Blue(Class2) | 高速・広範囲3Dリアルタイムスキャナー(M/Blue/Class2) | お問い合わせ |
| MotionCam-3D-M-Blue(Class3R) | 高速・広範囲3Dリアルタイムスキャナー(M/Blue/Class3R) | お問い合わせ | |
| MotionCam-3D-M-Red(Class3R) | 高速・広範囲3Dリアルタイムスキャナー(M/Red/Class3R) | お問い合わせ |

| 商品コード(型番) | 構成/内容 | 価格 | |
|---|---|---|---|
| 電源アダプタ | 24V power adapter with M12-A-coded connector | 24V 電源アダプタ M12-A | 30,000円 税込 33,000円 |
| イーサネット ケーブル |
Ethernet cable M12-X-coded / RJ45, PUR - 5m | M12X-RJ45イーサネットケーブル(5m) | 30,000円 税込 33,000円 |
| Ethernet cable M12-X-coded / RJ45, PUR - 10m | M12X-RJ45イーサネットケーブル(10m) | 35,000円 税込 38,500円 |
|
| Ethernet cable M12-X-coded / RJ45, PUR - 15m | M12X-RJ45イーサネットケーブル(15m) | 40,000円 税込 44,000円 |
|
| Ethernet cable M12-X-coded / RJ45, PUR - 20m | M12X-RJ45イーサネットケーブル(20m) | 45,000円 税込 49,500円 |
|
| Hi-Flex Ethernet cable M12-X-coded / RJ45, PUR - 10m | M12X-RJ45イーサネットケーブル (10m、フレックス) |
90,000円 税込 99,000円 |
|
| Hi-Flex Ethernet cable M12-X-coded / RJ45, PUR - 20m | M12X-RJ45イーサネットケーブル (20m、フレックス) |
120,000円 税込 132,000円 |
|
| トリガーケーブル | Power cable M12-A-coded / free end, PUR - 5m | M12-Aトリガーケーブル(5m) | 12,000円 税込 13,200円 |
| Power cable M12-A-coded / free end, PUR - 10m | M12-Aトリガーケーブル(10m) | 20,000円 税込 22,000円 |
|
| Power cable M12-A-coded / free end, PUR - 15m | M12-Aトリガーケーブル(15m) | 25,000円 税込 27,500円 |
|
| Power cable M12-A-coded / free end, PUR - 20m | M12-Aトリガーケーブル(20m) | 35,000円 税込 38,500円 |
|
| Hi-Flex power cable M12-A-coded / free end, PUR - 10m | M12-Aトリガーケーブル(10m、フレックス) | 40,000円 税込 44,000円 |
|
| Hi-Flex power cable M12-A-coded / free end, PUR - 20m | M12-Aトリガーケーブル(20m、フレックス) | 50,000円 税込 55,000円 |
|
| マウント | L shape mounting plate | マウントプレート(L字) | 10,000円 税込 11,000円 |
| Robotic Mount for Flanges D31.5, D50, D63 | ロボットアーム用マウントフランジ (D31.5, D50, D63) |
60,000円 税込 66,000円 |
|
| ビジョンシステム | Bin Picking Studio | ビンピッキング用ソフトウェア +ビジョンコントローラ |
お問い合わせ |
| Locator Studio | ロケーション用ソフトウェア +ビジョンコントローラ |
お問い合わせ | |
| ビジョンシステム (有償モジュール) |
AnyPick module for Boxes (Depalletization) | デパレタイズ用モジュール (Bin Picking / Locator Studio用) |
お問い合わせ |
| LayerPick module (Delayering) | ディレイヤー用モジュール (Locator Studio用) |
お問い合わせ | |
| MultiView module | マルチビュー用モジュール (Bin Picking / Locator Studio用) |
お問い合わせ | |
| ソフトウェア | Photoneo 3D Meshing | 3Dメッシュモデル作成ソフトウェア | お問い合わせ |
| カタログ | MotionCam-3D 高速・広範囲3Dリアルタイムスキャナー |
 [PDF形式:2.9MB] [PDF形式:2.9MB] |
|---|