
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 空間認識カメラユニット Odin1
空間認識カメラユニット
製品名
Odin1
製品名
Odin1
3D-LiDAR・カメラ・IMU・独自SLAMアルゴリズム「MindSLAM™」を全てデバイス内部で統合


- Pointcloud(RAW/色付き)・Pose・Trajectoryをリアルタイム出力
- 各センサはキャリブレーション済で、複雑な設定不要
- プラグ&プレイで動作
- 各センサの生データも取得可能
- 3つの動作モードを選択(Odometer/SLAM/ Relocalization)
Manifold Tech社のOdin1は、3D-LiDAR・カメラ・IMUと、独自SLAMアルゴリズム「MindSLAM™」を全てデバイス内部で統合した空間認識カメラユニットです。
MindSLAM™により生成されたPointcloud(RAW/色付き)・Pose・Trajectoryをリアルタイム出力することで、ロボット等に安定した自己位置推定機能を実装できます。カメラ/LiDAR/IMUの各センサ間のキャリブレーションやSLAM等の複雑な設定やチューニングは必要なく、プラグ&プレイで動作します。高性能な外部コンピュータも不要です。
各センサの生データも取得可能なので、独自アルゴリズムの開発や既存システムとの連携も可能とします。
| 3D-LiDAR | 解像度 | 240 × 180 |
|---|---|---|
| フレームレート | 10Hz(最大15Hz) | |
| 測定距離 | 0.2 ~ 70m(30m@10%反射) | |
| FOV | 120 × 90° | |
| 測定点数 | Up to 700,000pts/s | |
| 分解能 | 約0.5 × 0.5° | |
| レーザー | 940nm , class1 | |
| RGBカメラ | 解像度 | 1600 × 1296 |
| フレームレート | 10Hz(最大15Hz) | |
| FOV | 129 × 104° | |
| イメージサイズ | 1/2.9” | |
| ピクセルサイズ | 3 × 3um | |
| シャッター | グローバル | |
| IMU | 出力 | 6DoF、400Hz |
| システム全体 | built-in SLAM精度 | ±5cm +1%(環境による) |
| 出力データ | Pointcloud(original/color), Pose(10 or 400Hz) , カラー画像(original), IMU(original) | |
| 電源 | 12V(11 ~ 24W) | |
| サイズ (寸法図) |
100 × 62 × 43mm / 280g 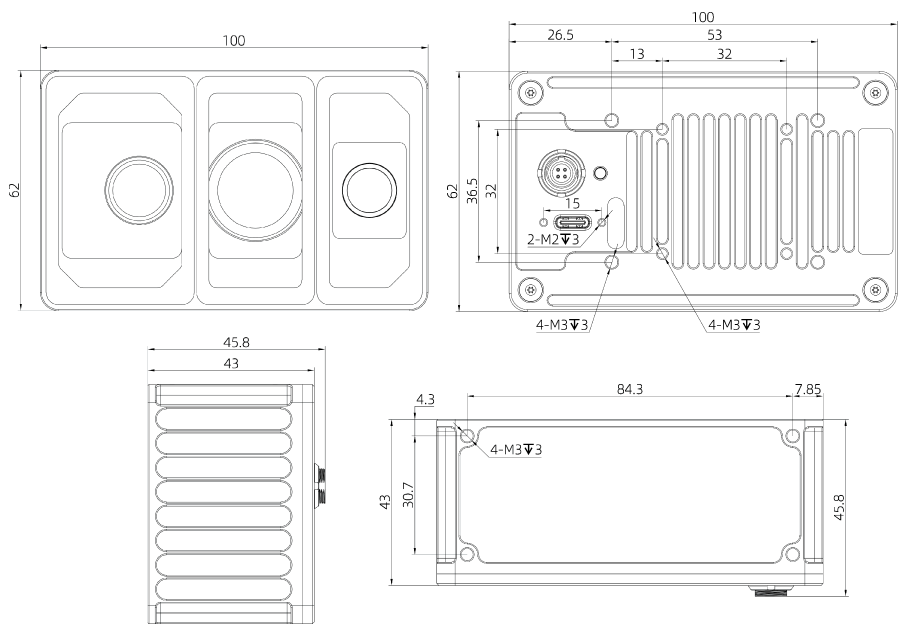 |
|
| 保護等級 | IP66 | |
| 動作温度 | -20 ~ 55℃ | |
| インタフェース | USB3 Type-C | |
| ソフトウェア | ビューワソフト(Windows), OpenSourceSDK(ROS1/ROS2) |
▲タブのトップへ戻る
▲タブのトップへ戻る
| 商品コード(型番) | 構成内容 | 価格 |
|---|---|---|
| Odin1 | 空間認識カメラユニット Odin1、 電源用ケーブル(DCプラグ、5.5mm/2.1mm、センタープラス)、USB3ケーブル(typeA to C) ※電源は含まれません |
お問い合わせ |
▲タブのトップへ戻る

- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 空間認識カメラユニット Odin1
