OpenCVで画像処理して表示する方法
概要
取得した画像の収縮処理を実装方法について解説します。キーボード押下する度に画像を取得し、画像処理を実施しています。フレームを取得する度に自動で画像処理をしたい場合には【コールバック関数の設定方法(OpenCVで二値化)】をご覧ください。
サンプルプログラム
| 利用した開発環境 | Visual Studio Code |
|---|---|
| SDK | IC Imaging Control 3.4/3.5 |
| デバイスドライバ | Cam33U_setup,gigecam_setup,usbcam,AFU420_setup,usb2pro_drv |
| デバイス | TISカメラ全般(MIPI CSI-2&FPD-Link IIIカメラを除く) |
| サンプル(Python) | image_processing_OpenCV_python.zip |
| exeファイル アプリケーション |
ー |
| 別途ファイル | ー |
| 関連参照URL | 11-image-processing.py |
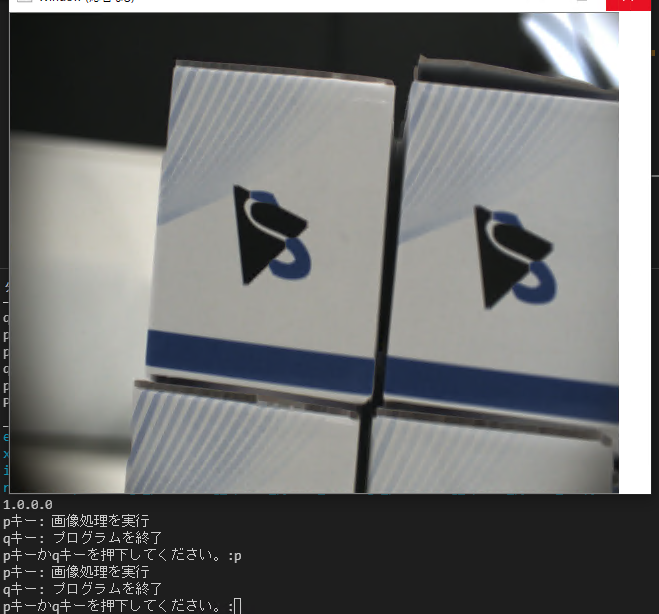
サンプルツールの出力
コード全体
import ctypes
import tisgrabber as tis
import cv2
import numpy as np
#tisgrabber_x64.dllをインポートする
ic = ctypes.cdll.LoadLibrary("./tisgrabber_x64.dll")
tis.declareFunctions(ic)
#ICImagingControlクラスライブラリを初期化します。
#この関数は、このライブラリの他の関数が呼び出される前に1回だけ呼び出す必要があります。
ic.IC_InitLibrary(0)
#ダイアログ画面を表示
hGrabber = tis.openDevice(ic)
#デバイスが有効か確認
if(ic.IC_IsDevValid(hGrabber)):
#ライブスタート開始 引数:0の時非表示、引数:1の時表示
#ライブ画面は非表示にしています。
ic.IC_StartLive(hGrabber, 0)
key = ""
while key != "q":
print("pキー: 画像処理を実行")
print("qキー: プログラムを終了")
key = input('pキーかqキーを押下してください。:')
if key == "p":
if ic.IC_SnapImage(hGrabber, 2000) == tis.IC_SUCCESS:
# 画像記述の変数を宣言する
Width = ctypes.c_long()
Height = ctypes.c_long()
BitsPerPixel = ctypes.c_int()
colorformat = ctypes.c_int()
# 画像の説明の値を取得する
ic.IC_GetImageDescription(hGrabber, Width, Height,
BitsPerPixel, colorformat)
# バッファサイズを計算
bpp = int(BitsPerPixel.value / 8.0)
buffer_size = Width.value * Height.value * bpp
# イメージデータを取得する
imagePtr = ic.IC_GetImagePtr(hGrabber)
imagedata = ctypes.cast(imagePtr,
ctypes.POINTER(ctypes.c_ubyte *
buffer_size))
# numpyの配列を作成する
image = np.ndarray(buffer=imagedata.contents,
dtype=np.uint8,
shape=(Height.value,
Width.value,
bpp))
# 画像にOpenCV関数を適用
image = cv2.flip(image, 0)
image = cv2.erode(image, np.ones((11, 11)))
#表示を縮小
resized_img = cv2.resize(image,(640, 480))
cv2.imshow('Window', resized_img)
cv2.waitKey(10)
else:
print("2秒間フレームが送られてきませんでした。")
ic.IC_StopLive(hGrabber)
cv2.destroyWindow('Window')
else:
ic.IC_MsgBox(tis.T("No device opened"), tis.T("Simple Live Video"))
ic.IC_ReleaseGrabber(hGrabber)
解説
#ライブスタート開始 引数:0の時非表示、引数:1の時表示
#ライブ画面は非表示にしています。
ic.IC_StartLive(hGrabber, 0)
key = ""
while key != "q":
print("pキー: 画像処理を実行")
print("qキー: プログラムを終了")
key = input('pキーかqキーを押下してください。:')
if key == "p":
if ic.IC_SnapImage(hGrabber, 2000) == tis.IC_SUCCESS:IC_StartLiveメソッドでカメラからのフレーム送信を開始します。while文のループの中で絶えずフレームを監視するようにしますが、フレームをバッファメモリ内に格納する際にはIC_SnapImage(グラバーポインタ,待機する時間(ミリ秒))メソッドを使用します。IC_SnapImageメソッドの引数に待機する時間(ミリ秒)を引き渡すことで、その間カメラから送られてくるフレームを待ち取得する度毎に次のロジックに進みます。なお、待機する時間(ミリ秒)を短くすればするほどフレーム受信を待機する時間を短くなりますが、必ずしも処理時間が早くなるわけではないのでご注意ください。
SnapImageメソッドによって、ライブ画像ストリームより静止画をキャプチャしリングバッファに保存が成功した後、OpenCVで画像を処理するために型をuint8に変更します。uint8に変更するためには画像のnumpyライブラリのndarrayを使用する必要がありますので下記の手順に沿ってコーディングしてください。
- 取得した画像の解像度・ピクセルごとの使用するビット数、カラーフォーマットを取得
- IC_GetImageDescription(hGrabber, Width, Height, BitsPerPixel,colorformat)
- バッファサイズの計算
- bpp = int(BitsPerPixel.value / 8.0)
- buffer_size = Width.value * Height.value * bpp
- イメージデータを取得
- imagePtr = ic.IC_GetImagePtr(hGrabber)
- imagedata = ctypes.cast(imagePtr, ctypes.POINTER(ctypes.c_ubyte * buffer_size))
- NumPy配列で表されたカラー画像にする
- np.ndarray(buffer=imagedata.contents, dtype=np.uint8, shape=(Height.value, Width.value, bpp))
取得したNumPy配列で表された画像をもとにOpenCVの関数で二値化をしています。
# 画像にOpenCV関数を適用
image = cv2.flip(image, 0)
image = cv2.erode(image, np.ones((11, 11)))
#表示を縮小
resized_img = cv2.resize(image,(640, 480))
cv2.imshow('Window', resized_img)
cv2.waitKey(10)この一連の処理はqキーを押下する度に実行されます。上記の例では二値化のみですが、リアルタイムに画像処理したり、バーコードのデコードやOCRするにもご利用いただけます。

